Kraków 2013-06-24
Radiolokacja na lotnisku.

ZDPSR Bystra – Zdolna do Przerzutu Stacja Radiolokacyjna produkcji polskiej PIT-RADWAR S.A, zainstalowana na opancerzonym pojeździe Żubr-P. Radar jest nowoczesną, trójwspółrzędną stacją wyposażona w antenę z aktywnym skanowaniem elektronicznym (AESA). Wykorzystywana w systemach obrony przeciwlotniczej krótkiego (SHORAD) i bardzo krótkiego (VSHORAD) zasięgu. Radar jest wielofunkcyjny i wielozadaniowy o wszechstronnych możliwościach i zastosowaniach, na przykład wsparcia lądowania samolotów i śmigłowców na lotniskach polowych.
Radiolokacja na lotnisku podczas lądowania.
W rozdziale „Zarys historii nawigacji lotniczej. Radary 1950r.-1990r.” przedstawiliśmy sprzęt radiolokacyjny użytkowany w Wojsku Polskim i w lotnictwie cywilnym, a także wskazaliśmy na sukcesy Polskiej Radiolokacji tamtego okresu. Obecnie przedstawimy wykorzystanie radiolokacji w newralgicznym momencie lotu samolotu i śmigłowca, czyli podczas lądowania. Przypomnimy, iż w innych Rozdziałach zwróciliśmy uwagę na fakt konieczności umożliwienia lądowania samolotów w trudniejszych warunkach atmosferycznych. Było to związane z ekonomią oraz zastosowaniami militarnymi. W 40-latach w USA tamtejsza poczta dostrzegła spore straty finansowe z powodu niedostarczania przesyłek na czas, co wiązało się z tym, że około 25 % lotów z pocztą kończyło się na innych lotniskach niż docelowe. Po prostu, warunki pogodowe nie pozwalały lotnikom na lądowanie w złych warunkach pogodowych (niska podstawa chmur, mgła, silnie opady deszczu lub śniegu). Gdyby tylko załoga samolotu znała dokładną swoją pozycję, gdyby widziała drogę startową – to lądowanie w takich warunkach atmosferycznych mogłoby się odbyć.
Jeszcze jedna uwaga. W 50/60-latach powstawały samoloty, które przez producentów były reklamowane jako – „Samolot działający w każdych warunkach atmosferycznych.” Jak się jednak boleśnie przekonano, istnieją takie warunki pogodowe, które są w stanie uniemożliwić lot samolotu. Tym parametrem jest siła wiatru, a tutaj mamy wszystkie tajfuny, cyklony, tornada, trąby powietrzne, huragany i wichury.
Pierwsze systemy lądowania w złych warunkach atmosferycznych.
Pierwsze systemy lądowania w złych warunkach pogodowych niemal natychmiast zaczęły się rozwijać dwutorowo. Jedne to systemy stacjonarne, a drugie to systemy mobilne lub przewoźne. Bo musimy pamiętać, że był to okres drugiej wojny światowej i w wykorzystaniu urządzeń liczyła się możliwość ich transportu.
W 1944 roku, powstał pierwszy mobilny system kontrolowanego podejścia do lądowania (Ground-controlled approach), który otrzymał wojskowe oznaczenie AN/MPN-1 (M-mobilny, P-radar, N-nawigacja). Zestaw zawiera dwa systemy typu PE-127, każdy o mocy 7,5 kW. Jeden pracuje horyzontalnie, a drugi w azymucie. System pracuje w zakresie wysokiej częstotliwości (HF) i bardzo wysokiej częstotliwości (VHF). Zestaw ma zasięg 30 mil (48 km) i zasięg w pułapie 4 000 ft (1 200 m). Operator widzi podchodzący do lądowania samolot na dwóch ekranach i poprzez układ radiostacji łączności - nadajnik SCR-274 i odbiornik BC-342, przekazuje stale załodze samolotu ich położenie.
Powstała cała seria mobilnych radarów kontroli podejścia do lądowania; AN/MPN-2, AN/MPN-3, AN/MPN-5, AN/MPN-8, AN/MPN-11, AN/MPN-14, AN/MPN-25. W wersji AN/MPN-11 istotną zmianą było przedstawienie obu obrazów na jednym ekranie CRT. W wersji AN/MPN-14 zastosowano urządzenie identyfikacyjne poprzez radar wtórny. Ostatnia wersja AN/MPN-26 była opracowywana z początkiem XXI wieku, ale w 2008 roku, program został anulowany. Amerykańskie systemy rozwijały się w zależności od potrzeb. Najbardziej złożone były zainstalowane na 9 samochodach wielkości typu wan. W niektórych przypadkach, część urządzeń z danego systemu, była instalowana na stałe i tylko w ostateczności była przewożona. Ta sytuacja wynikała z rachunku ekonomicznego. Pierwsze takie rozwiązania pojawiły się w połowie 50-lat. Systemy te były popularnie nazywane Systemami Niewidomego Nawigowania. Dlatego w CCCP, a potem w Układzie Warszawskim przyjęła się nazwa System Ślepego Lądowania.
Z początkiem 50-lat zaczęto także opracowywać inny system instrumentalnego podejścia do lądowania. Na wstępnie podamy, że system ten wywodzi się z systemu Eureka-Rebeka z 1943 roku, opracowanego w celach desantowych w UK. Znalazł on potem inne zastosowania, w tym do lądowania. Na końcu drogi startowej (patrząc z kierunku lądującego samolotu) ustawiano nadajnik, a właściwie dwa nadajniki. Jeden emitował fale w poziomie, drugi w pionie. Jedne w Alfabecie Morse’a były kropkami, a drugie kreskami. Na samolocie zainstalowana była jednostka zwana Rebeka. Pilot tak sterował samolotem, aby był najsilniejszy sygnał kropek i kresek, bo on zależał od położenia samolotu. Jest to wczesna wersja lokalizatora z bardziej popularnego systemu lądowania według przyrządów, czyli ILS.
Jak więc, nie trudno zauważyć, już na przełomie 40/50-lat XX wieku, istniały wyrafinowane systemy lądowania. Jednak teraz odzywają się; bezpieczeństwo, ekonomia i interesy imperialne. W zależności od tego, który z tych czynników bierze górę, to tak rozwija się technika i jej zastosowanie. Dlatego w 50-latach XX wieku, sięgnięto po prostsze systemy ułatwiające lądowanie samolotów.
System lądowania NDB.
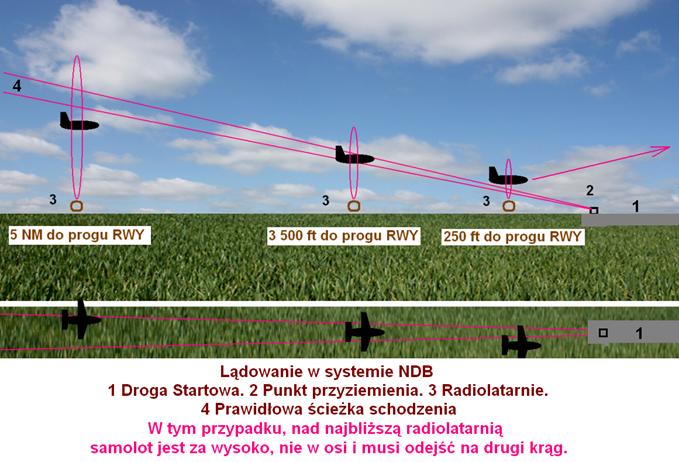
W Rozdziale „Nawigacja. Zarys historii nawigacji”, wspomnieliśmy o systemie nawigacyjnym NDB (Non-Directional Beacon), który jest złożony z bezkierunkowych radiolatarni naziemnych i odbiorników na pokładzie samolotu. Na podstawie założeń tego systemu opracowano w USA system lądowania. Jest on oparty na trzech radiolatarniach umieszczonych w osi pasa (DS. lub po angielsku RWY), na ścieżce podejścia, w odpowiednich odległościach. Załoga samolotu podczas podejścia przelatując nad radiolatarnią najdalszą, wie jaka odległość dzieli ją od progu pasa i jest w stanie ustawić odpowiedni kąt schodzenia do lądowania. Przelot nad radiolatarnią środkową ma potwierdzić prawidłowy tor zejścia, a przelot nad radiolatarnią najbliższą pozwala wprowadzić drobne korekty lub samolot ma odejść na drugi krąg. Radiolatarnia najbliższa znajduje się w miejscu decyzji (lądujemy lub odchodzimy). Do odbioru sygnałów na pokładzie samolotu używa się dwóch radiokompasów ADF. Ten system był używany w USA od początku 50-lat do połowy 60-lat i był stosowany w lotnictwie komercyjnym, a zastąpił go system ILS.
Układ NDB w nawigacji jest stosowany do czasów obecnych, z uwagi na jego prostotę. Aktualnie skład się z naziemnego nadajnika radiowego niskiej częstotliwości, używanego głównie jako podejścia instrumentalnego do lotnisk i platform wiertniczych na morzach. NDB transmituje wielokierunkowy sygnał, który jest odbierany przez ADF (standardowy przyrząd na pokładzie samolotów i śmigłowców). Pilot korzysta z niego do określenia kierunku NDB w stosunku do samolotu. Aby nawigować przy użyciu ADF, pilot wybiera częstotliwość NDB i kompas (lub strzałka) ADF wskazuje pozycję stacji. Sygnał NDB jest wysyłany kodem Alfabetu Morse’a, co umożliwia identyfikację NDB. NDB jest używany w lotnictwie i standaryzowany przez ICAO, Międzynarodowej Organizacji Lotnictwa Cywilnego. Załącznik 10, określa, że NDB ma pracować na częstotliwości pomiędzy 190 kHz – 1 800 kHz. W Ameryce Północnej, zakres częstotliwości wynosi zwykle 190 kHz – 625 kHz, dla operacji morskich na Morzu Północnym 500 kHz – 1 250 kHz, a w Brazylii używa się 1 500 kHz. Zazwyczaj NDB mają moc od 25 W do 125 W, przy zasięgu na odbiór do ok. 100 NM. Wyższe systemy zasilania od 500 W do 1 000 W stosowane są do dalszych zasięgów. Zasięg zależy od wielu czynników, takich jak moc wyjściowa, antena, przewodność gruntu, częstotliwości, warunków na miejscu, szerokość geograficzna, oraz stanu odbiornika ADF. Układy NDB są wysoce niezawodne. Zwykle zapewniają dekady nieprzerwanej służby Są tanie w zakupie i obsłudze. Z tego powodu, NDB są nadal używane na świecie. Ich obecnie, główne zastosowanie, to instrumentalne podejście śmigłowców do platform wiertniczych na morzach (od 1960r.). Jednak stosowane jest także do przyrządowego podejścia na radiolatarnię przy lotniskową, zwaną LOM (Locator Outer Marker) do naprowadzenia na system lądowania ILS. LOM wyznacza początkowy obszar podejścia ILS. Stosuje się go na tych lotniskach, które nie dysponują radarami typu ATC (Air Traffic Control). Jednak NDB posiada pewne wady, które powodują jego niedokładność funkcjonowania, szczególnie podczas burz i w porze nocnej. Dlatego został zastąpiony przez bardziej precyzyjne systemy VOR i TACAN (dla wojska).
Technika lądowania z wykorzystaniem USL.
USL (Urządzeń Ślepego Lądowania).
Odmianą systemu lądowania NDB opracowanego na Zachodzie, stał się system lądowania NDB opracowany na Wschodzie w imperium moskiewskim. Liczbę radiolatarni bezkierunkowych ograniczono do dwóch, a podejście do lądowania realizuje się w tak zwana „ósemkę”, z pierwotnym przelotem nad lotniskiem, namierzając jej radiostację łączności, aby załoga mogła sobie wyrobić odległość po czwartym zakręcie do lotniska. Lub, co stało się normą, z pierwotnym przelotem nad radiolatarnia dalszą.
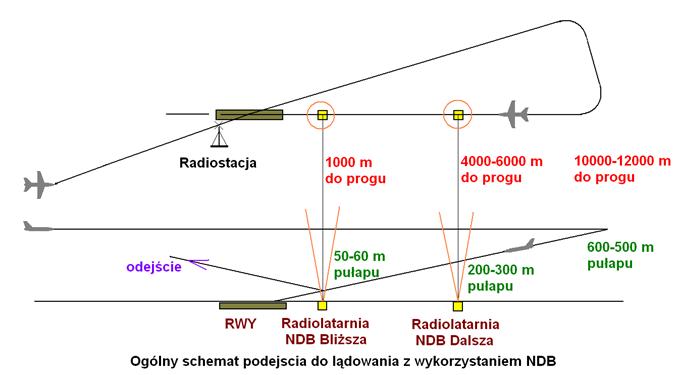
Podejście do lądowania w systemie NDB z wykorzystaniem radiostacji łączności na lotnisku i radionamiernika. Praca Karol Placha Hetman.
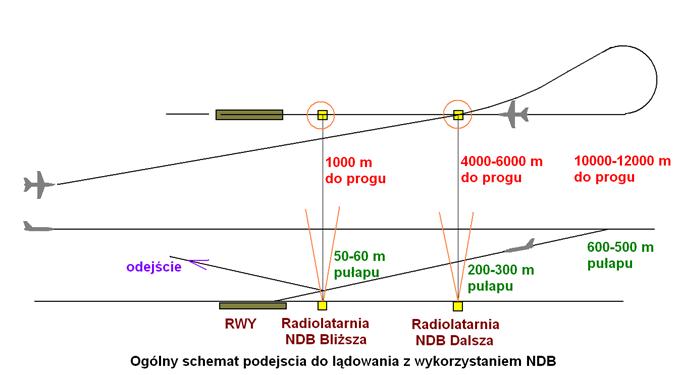
Podejście do lądowania w systemie NDB z wykorzystaniem radiolatarni dalszej. Praca Karol Placha Hetman

Zarówno w pierwszym jak i w drugim przypadku, nawigowanie było mało precyzyjne, dlatego system ten musiał zostać zmodyfikowany, poprzez dodanie radaru, przynajmniej dwu-współrzędnego (2D, odległościomierza).
Technika lądowania z wykorzystaniem USL (Urządzeń Ślepego Lądowania) polega na wyjściu nad dalszą radiolatarnię prowadzącą nad chmurami, a następnie na wykonaniu lotu z kursem odwrotnym od kursu pasa startowego, z niewielkim odchyleniem w bok. Po ustalonym czasie wykonuje się zakręt (nr 3, 4) na kurs lądowania, ustawiając się w jego osi. W tym czasie manewruje się samolotem tak, by wskazówka radiokompasu pokazywała „0 stopni”, a kurs magnetyczny pokrywał się z magnetycznym kursem pasa startowego. Dla ułatwienia wskazówka radiokompasu jest zamontowana na tym samym przyrządzie, co busola żyromagnetyczna, na której jest też wskaźnik ustawiany na kurs pasa. Zgranie obu wskazówek na „0 stopni” to lot w kierunku dalszej radiolatarni prowadzącej z kursem pasa, czyli lot w jego osi. Odlot od radiolatarni dalszej z kursem odwrotnym od pasa pozwala na wyrobienie odpowiedniej odległości, potrzebnej na zniżanie samolotu z takim obliczeniem (odpowiednio dobiera się prędkość opadania na wariometrze, przy zadanej prędkości lotu), by na odległości 12 000 m mieć pułap 600 m. Wtedy wchodzi się na ścieżkę podejścia nachyloną około 3 stopnie w stosunku do powierzchni ziemi, co pozwoli na dolecenie do dalszej radiolatarni prowadzącej (zwykle 4 000 m od pasa) na wysokości około 200 m. Przy korzystaniu z USL mniej więcej w tym momencie trzeba wyjść z chmur i zobaczyć ziemię, ale pas może być jeszcze nie widoczny. Widzialność pod chmurami może być bowiem rzędu 2 000 – 3 000 m. Widzialność to wartość względna. Obiekty na ziemi powoli wyłaniają się z mgły (deszczu, zamglenia), początkowo niewyraźnie, a później coraz lepiej. Obiekty kontrastowe widać dalej, a silne światła – najdalej, niekiedy dwa-trzy razy dalej, niż wynosi „oficjalna” widoczność. Dlatego w trudnych warunkach atmosferycznych włącza się też światła pasa i ścieżki podejścia. Z takiego systemu USL korzystano praktycznie już w czasie drugiej wojny światowej. W 50-latach system został uzupełniony o stacje radiolokacyjne (na wschodzie system RSP). Systemy USL pozostały na lotniskach do chwili obecnej (2010 roku). Stanowią one istotne uzupełnienie popularnych ILS, pozwalając na kontrolę, czy ILS pracuje prawidłowo.
Uzupełnieniem systemu USL na lotniskach jest RSL. RSL to nic innego jak stacja radiolokacyjna precyzyjnego podejścia. Jego głównym elementem jest radar obserwujący ścieżkę podejścia do lądowania w zakresie kilkunastu-kilkudziesięciu stopni na lewo i prawo od osi pasa, od powierzchni ziemi do kąta kilkunastu- kilkudziesięciu stopni w górę. Samoloty podchodzą do lądowania tak jak według USL, ale dodatkowo operator tego radaru podaje załodze poprawki, mówiąc pilotowi przez radio, czy ma wykonać dochylenie w lewo bądź w prawo, zmniejszyć lub zwiększyć zniżanie. Częścią takiego systemu na Wschodzie jest też drugi radar, obserwujący dookrężnie ruch wokół lotniska, pozwalający wyprowadzić samolot wprost na zakręt nr 4, na kurs lądowania w odpowiedniej odległości od pasa i nie trzeba już przelatywać nad radiolatarnią dalszą, robiąc typową dla USL ósemkę, wyrabiając odległość od pasa czasem i prędkością lotu od dalszej radiolatarni prowadzącej w locie od pasa.
Na Zachodzie wyprowadzeniem na punkt zakrętu na kurs lądowania zajmuje się Kontrola Zbliżania, dysponująca własnym radarem. Dopiero po zakręcie przekazuje się załogę pod opiekę operatora radaru precyzyjnego. Na Wschodzie system taki ma nazwę RSP (Radiołokacjonnaja Sistiema Posadki), tłumaczoną na Polski jako RSL (Radiolokacyjny System Lądowania). Jeden nawigator (operator) RSL spełnia funkcję typową dla zachodniej Kontroli Zbliżania, zaś drugi, typową dla kontrolera radaru precyzyjnego, zwanego na zachodzie PAR (Precision Approach Radar). RSP (RSL) czy PAR jest oczywiście systemem starszym, niż ILS. W cywilu niemal wszędzie został on już wycofany. Ale wojsko z różnych względów go używa nadal i będzie używać w przyszłości. Po pierwsze, dubluje on funkcje ILS i może być pomocny w przypadku uszkodzenia lub zakłócenia ILS, czy przy uszkodzeniu samolotu, w którym korzystanie z pokładowej awioniki jest niemożliwe. Po drugie, rozwinięcie ILS na obcym lotnisku jest długotrwałe i pracochłonne, a rozstawienie RSL czy PAR trwa krótko i system jest szybko gotowy do pracy. Dlatego zarówno na Wschodzie, jak i w NATO taki system jest stosowany nadal i nie traktuje się go jako „przestarzały”, „archaiczny”, „muzealny”. Oczywiście, podstawowym jest ILS (lub MLS – mikrofalowa odmiana ILS), a na Wschodzie PRMG, ale RSL/PAR nikt nie wyrzuca. Korzystanie z RSL jest nieco inne, niż z zachodniego PAR. Różnica polega na odmiennej procedurze stosowanej na wschodzie, a odmiennej procedurze stosowanej w NATO i w ogóle na zachodzie. Ale to tylko kwestia sposobu wykorzystania systemu, bowiem zachodni kontroler radaru precyzyjnego podejścia mógłby hipotetycznie usiąść przed wskaźnikiem RSL, a następnie pracować po swojemu i vice-versa. Na wschodzie pilot zgłasza przelot ustalonych punktów (1 000 m, 600 m, dalsza, bliższa, itd.), a nawigator RSL potwierdza mu to podając odległość do progu pasa. Nawigator RSL w zasadzie włącza się tylko w ustalonych miejscach, ale także zawsze wtedy, gdy pilot odchyla się od osi pasa bądź w płaszczyźnie pionowej – od ścieżki podejścia. Wówczas podaje mu komendy, np. „5 stopni w lewo” bądź „zmniejsz zniżanie o połowę”. Za każdym razem pilot potwierdza otrzymanie takiej komendy podając swoją wysokość. Z kolei wg procedury NATO wykonuje się tzw. „talk down”. Kontroler radaru precyzyjnego podejścia (odpowiednik nawigatora RSL) wygłasza ciągły monolog podając poprawki bądź potwierdzając przemieszczanie się samolotu po ustalonej ścieżce podejścia. Przy okazji, kontroler radaru precyzyjnego podejścia nie powie „pięć stopni w prawo” tylko „kurs 265”, jeśli kurs pasa wynosi 260 stopni. Niemniej jednak w ten ciągły trajkot, pilot nie jest w stanie się włączyć, więc tu się nie potwierdza komend. Kontroler radaru precyzyjnego podejścia wie, że pilot go słyszy, bo widzi, czy pilot wykonuje jego komendy.
Co innego to kwestia wykonywania komend nawigatora RSL (kontrolera PAR). Jeśli nakazuje on przejście do lotu poziomego, a następnie przejście na wznoszenie, to tego ignorować nie wolno, bo zejście pod ścieżkę, a zwłaszcza na małej odległości od pasa, czyli na małej już wysokości, to bardzo niebezpieczne.
Według wojskowych procedur USL z RSL pozwala na lądowania w dzień na samolotach poddźwiękowych, w tym transportowych, przy podstawie chmur 150 m i widzialności 1 500 m. Oczywiście dla różnych generacji stacji radiolokacyjnych te wartości mogą być nieco odmienne.
I jeszcze jedna uwaga. Samoloty bojowe 50/60-lat miały bardzo duże prędkości podejścia do lądowania. Aby skrócić dobieg, podejście wykonywano pod znacznie większym kątem (niż obecnie), aby część energii wytracić na amortyzatorach podwozia samolotu.
System ślepego lądowania RSP.
RSP (Radiołokacjonnaja Sistiema Posadki – Radiolokacyjny System Lądowania).
Z końcem 50-lat XX wieku, w CCCP powstał się system radiolokacyjny wspomagający lądowanie samolotu. Jest o wzorowany na rozwiązaniach Amerykańskich. System ten, w lotnictwie wojskowym jest wykorzystywany do chwili obecnej (także w Rzeczypospolitej Polskiej), a w imperium moskiewskim opracowywane są kolejne jego generacje. Najbardziej popularne były systemy oznaczone RSP-4, 5, 6, 7, 8 i 10.
System RSP-7 jest przeznaczony do kontroli ruchu statków powietrznych w obszarze lotniska i zapewnienia lądowanie samolotów w trudnych warunkach pogodowych, w dzień iw nocy. W jego skład wchodzi; Radar kontroli obszaru (ДРЛ) zakresu UHF. Radar precyzyjny (ПРЛ). Układ kontroli swój-obcy. Dwa zestawy łączności radiowej РСИУ-4М lub R-801. Dwa agregaty prądotwórcze АБ-8М. Urządzenia i wyposażenie naprawcze. System produkowany był w opcji przewoźnej jako (РСП-7У – RSP-7U) lub w wersji mobilnej (РСП-7 – RSP-7M maszyna). Wersja mobilna jest zamontowana na samochodach ZiŁ-157 i przyczepach 2PN-2.
System RSP-7T został dodatkowo wyposażony w dwa magnetofony służące do zapisu rozmów między kontrolerami, a załogą samolotu. Są także inne mniejsze różnice. System wszedł na uzbrojenie w połowie 60-lat. W porównaniu do poprzednich, system RSP-7 ma poprawione warunki socjalno-bytowe operatorów. W stacji operatorskiej zamontowano ogrzewanie elektryczne oraz piecyk węglowo-drzewny (tak zwana koza). Zamontowano także wentylator. Jest zbiornik wody pitnej oraz kuchenka.
Podstawowe dane RSP-7; Zasięg radaru kontroli lotniska do 180 km. Zasięg radaru precyzyjnego 60 km. Identyfikacja swój-obcy 140 km. Zasięg radiostacji łączności R-801 do 180 km.


Opracował Karol Placha Hetman