Kraków 2013-10-04
System lądowania ILS.


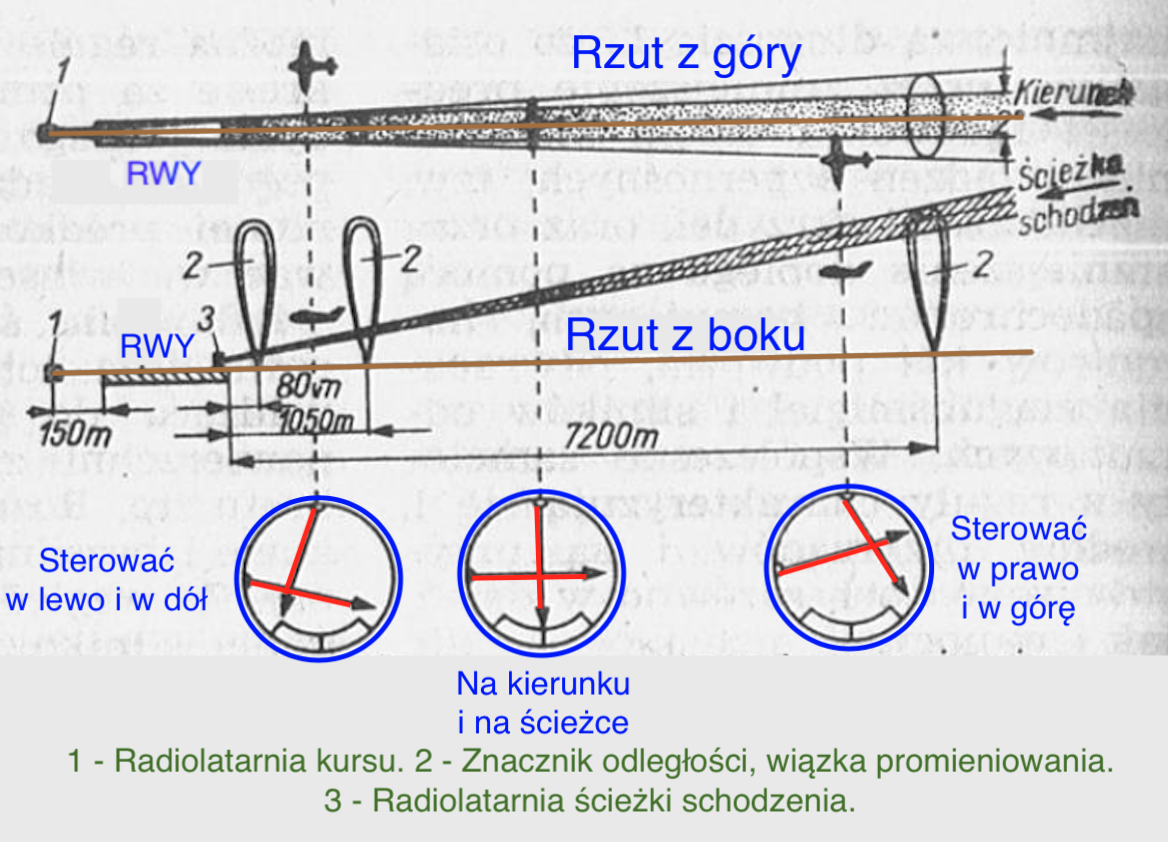
ILS (instrument landing system) to radiowy system wspomagający lądowanie samolotu w warunkach ograniczonej widoczności. Jest zaliczany do systemów nawigacyjnych. System umożliwia precyzyjne prowadzenie samolotu od granicy zasięgu do pewnego punktu na ścieżce schodzenia lub nawet do samego przyziemienia. Zależy to od kategorii systemu. System składa się z następujących urządzeń. Radiolatarnia kierunku emitująca sygnał w płaszczyźnie poziomej i wyznaczająca w przestrzeni oś drogi lądowania. Radiolatarnia ścieżki podejścia emitująca sygnał w płaszczyźnie pionowej, wyznaczająca w przestrzeni kąt podejścia do lądowania. Trzy radiolatarnie znakujące: outher marker (OM), middle marker (MM), inner marker (IM), służące określaniu odległości i wysokości statku powietrznego w stosunku do progu drogi startowej. Zamiast radiolatarni znakujących może być radio-dalmierz (distance measuring equipment). Radiolatarnie emitują sygnały radiowe o odpowiedniej częstotliwości (np. dla ścieżki schodzenia; 150 Hz poniżej ścieżki schodzenia, a 90 Hz powyżej ścieżki schodzenia). Urządzenia pokładowe samolotu odbierają sygnały wysyłane przez radiolatarnie i na tej podstawie automatycznie, półautomatycznie lub manualnie załoga steruje samolotem.


Kategorie ILS:
Istnieją trzy kategorie systemu ILS (CAT III ma trzy działy):
Kategoria I (CAT I) – podejścia precyzyjnego i lądowania z wysokością decyzji nie niższą niż 60 m (200 ft) nad wzniesieniem strefy przyziemienia, widzialnością nie mniejszą niż 800 metrów (2 625 ft) i RVR nie niższym niż 550 m (1 804 ft).
Kategoria II (CAT II) – podejścia precyzyjnego i lądowania z wysokością decyzji nie mniejszą niż 30 m (100 ft) i RVR co najmniej 350 m.
Kategoria III A – wysokość decyzji wynosi co najmniej 30 m (100 ft) nad wzniesieniem strefy przyziemienia przy RVR nie niższym niż 200 m.
Kategoria III B – przy wysokości decyzji 15 m (50 ft) nad wzniesieniem strefy przyziemienia i RVR co najmniej 50 m.
Kategoria III C – brak wysokości decyzji i ograniczeń widzialności wzdłuż drogi startowej, lądowanie może się odbyć przy zerowej widoczności.
RVR (runway visual range – zasięg widzenia wzdłuż drogi startowej), Określa widzialność (odległość), z jaką pilot statku powietrznego widzi z osi pasa startowego oznakowania nawierzchni drogi startowej wyznaczającej pas startowy lub identyfikuje jego linię środkową. RVR wyraża się w stopach (ft) lub metrach.
System ILS jest obecnie standardowym radiowym systemem nawigacyjnym wspomagającym lądowanie i każde większe lotnisko posiada co najmniej jeden kierunek podejścia obsługiwany przez system ILS.
Jak wszystko, ILS ma pewne wady. Wyznacza tylko jedną stałą ścieżkę schodzenia. Dysponuje tylko 40 kanałami pracy. Jest podatny na zakłócenia ze strony rozgłośni pracujących na sąsiednich częstotliwościach. Teren zamontowania anten musi być wyrównany (wolny od odbić powierzchniowych). Wysoki koszt zakupu i uruchomienia (w 2008 roku około 4 milionów złotych). Dlatego są nadal prowadzone badania nad innymi systemami radiowego lądowania, takich jak MLS (microwave landing system, pracujący na mikrofalach) lub CDGPS (wykorzystujące nawigację satelitarną).
Po przystąpieniu Rzeczypospolitej Polski do NATO (1999 rok) standardem na wojskowych lotniskach stał się system ILS. Z uwagi na wysokie koszty, system ten był wprowadzany stopniowo. Na przykład na Lotnisku Krzesiny uruchomiono go w 2006 roku, a na Lotnisku Mirosławiec w 2009 roku.
Opracował Karol Placha Hetman